Console Screen and List of Commands (alphabetical)
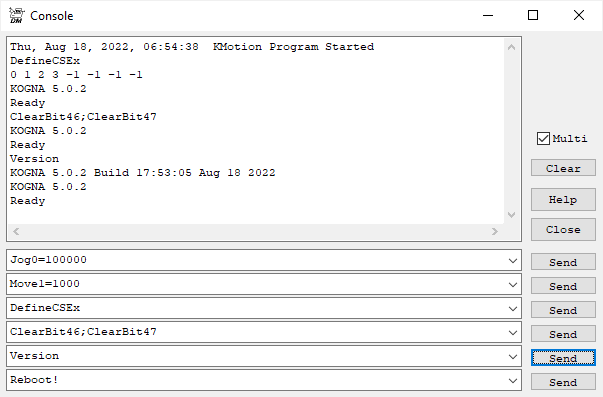
The Console Screen displays messages from the DSP and the PC. The Console window retains the last 1000 lines of text. After more than 1000 lines are displayed the earliest messages scroll off into a permanent text file (LogFile.txt) in the KMotion\Data subdirectory.
To Send a command to the DSP enter the text string in the bottom command cell and press the Send button.
Selecting the ![]() Check box changes from a single command line to multiple command lines,
see below. This allows several commands to be entered and then easily
sent with a single push button.
Check box changes from a single command line to multiple command lines,
see below. This allows several commands to be entered and then easily
sent with a single push button.
Multiple commands may be entered on a single line by separating the commands with a semicolon. For example: SetBit46;SetBit47
See the alphabetical list for available commands below or see commands grouped by category here.
Commands (alphabetical):
0-9
A
Arc<XC> <YC> <RX> <RY> <θ0> <dθ>
<Z0> <A0> <B0> <C0>
<Z1> <A1> <B1> <C1>
<a> <b> <c> <d> <tF>
ArcZX<ZC> <XC> <RX> <RY> <θ0> <dθ>
<Y0> <A0> <B0> <C0>
<Y1> <A1> <B1> <C1>
<a> <b> <c> <d> <tF>
ArcYZ<YC> <ZC> <RX> <RY> <θ0> <dθ>
<X0> <A0> <B0> <C0>
<X1> <A1> <B1> <C1>
<a> <b> <c> <d> <tF>
ArcHex<XC> <YC> <RX> <RY> <θ0> <dθ>
<Z0> <A0> <B0> <C0>
<Z1> <A1> <B1> <C1>
<a> <b> <c> <d> <tF>
ArcHexZX<ZC> <XC> <RX> <RY> <θ0> <dθ>
<Y0> <A0> <B0> <C0>
<Y1> <A1> <B1> <C1>
<a> <b> <c> <d> <tF>
ArcHexYZ<YC> <ZC> <RX> <RY> <θ0> <dθ>
<X0> <A0> <B0> <C0>
<X1> <A1> <B1> <C1>
<a> <b> <c> <d> <tF>
B
C
ConfigSpindle<T> <A> <U> <W> <C>
D
DefineCS<X> <Y> <Z> <A> <B> <C>
DefineCSEX<X> <Y> <Z> <A> <B> <C> <U> <V>
DefineCSP=<XP><YP><ZP><AP><BP><CP><UP><VP>
E
F
G
H
I
IIR<N> <M>=<A1> <A2> <B0> <B1> <B2>
J
K
L
Linear<X0> <Y0> <Z0> <A0> <B0> <C0>
<X1> <Y1> <Z1> <A1> <B1> <C1>
<a> <b> <c> <d> <tF>
LinearHex<X0> <Y0> <Z0> <A0> <B0> <C0>
<X1> <Y1> <Z1> <A1> <B1> < C1>
<a> <b> <c> <d> <tF>
LinHex1<X1> <Y1> <Z1> <A1><B1> <C1>
<a> <b> <c> <d> <tF>
LinHexEx1<X1> <Y1> <Z1> <A1> <B1> <C1> <U1> <V1>
<a> <b> <c> <d> <tF>
M
MoveAtVelAccelSoft<N>=<D><V><A>
MoveRelAtVelAccel<N>=<D> <V><A>
MoveRelAtVelAccelSoft<N>=<D> <V><A>
MoveXYZABC<X> <Y> <Z> <A><B><C>