Probe Response Delay Mach3
Posted: Mon Apr 19, 2021 3:48 am
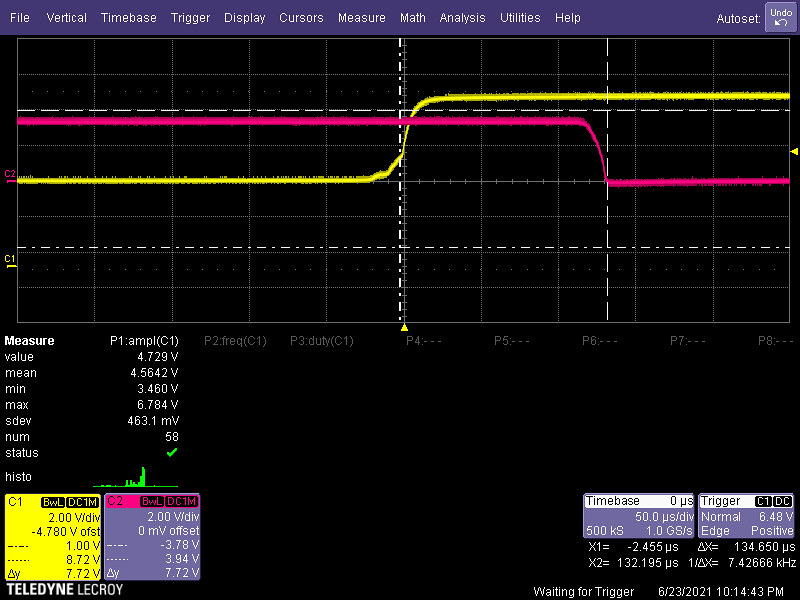
I installed a Renishaw probe and receiver on my mill. I connected to pin 5 (Bit 44) on the 26 pin connector with a 4.7k ohm resistor as a pull down. I modified my NotifyMach3.c to add the code from the probing example and it seems to work bit there is a delay from when the probe touches to when it sees the touch and stops. Short triggers are missed entirely if I just tap on the stylus the kflop never sees it. I put a scope on the input to the kflop and there is no electrical delay to the input pin.
Any ideas?
-Jerry
Any ideas?
-Jerry
Code: Select all
#include "KMotionDef.h"
//Plugin calls for Mach3 NotifyPlugins Commands
#define X 0
#define Y 1
#define Z 2
float DecelTimeForAxis(int axis);
main()
{
int msg = persist.UserData[6]; // Mach3 notify Message 10000-10999
printf("Mach3 Notify Call, Message = %d\n",msg);
Delay_sec(2.0);
printf("Done\n");
//if (msg==10084)
//{
//Tap();
//}
int msg = persist.UserData[6]; // Mach3 notify Message 10000-10999
printf("Mach3 Notify Call, Message = %d\n",msg);
if (msg==10100)
{
// adjust the commanded position to match the glass scale encoder
DisableAxis(X);
EnableAxisDest(X,chan[X].Position);
}
if (msg==10101)
{
// adjust the commanded position to match the glass scale encoder
DisableAxis(Y);
EnableAxisDest(Y,chan[Y].Position);
}
if (msg==10102)
{
// adjust the commanded position to match the glass scale encoder
DisableAxis(Z);
EnableAxisDest(Z,chan[Z].Position);
}
if (msg==10500)
{
if (CS0_StoppingState == 0)
StopCoordinatedMotion();
else
ResumeCoordinatedMotion();
}
if (msg==10300)
{
// User wants to disable Z (switch to OL)
DisableAxis(Z);
chan[Z].OutputMode = STEP_DIR_MODE;
EnableAxisDest(Z,chan[Z].Position);
}
if (msg==10301)
{
// User wants to enable Z (switch to CL)
DisableAxis(Z);
chan[Z].OutputMode = CL_STEP_DIR_MODE;
EnableAxisDest(Z,chan[Z].Position);
}
// handles probing
//
// flag is 0 - while watching for probe hit
// flag is 1 - if probe was already set from start
// flag is 2 - after successful probe hit
// flag is 3 - Tells Plugin to upload status (3) to
// DRO 1100 and let User handle the error
//
// returns the captured results in User Variables
// X - 50+51
// Y - 52+53
// Z - 54+55
// A - 56+57
// B - 58+59
// C - 60+61
// status result 62
#define PROBE_BIT 44
#define PROBE_ACTIVE_STATE 0
#define PROBE_ERROR_HANDLING 0 // 0 Stops Mach3 on probe error
// #define PROBE_ERROR_HANDLING 3 // 3 User must query DRO 1100 and handle error
if (msg==20000)
{
double *d = (double *)&persist.UserData[MACH3_PROBE_RESULTS_VAR];
int flag=1;
persist.UserData[MACH3_PROBE_STATUS_VAR]=PROBE_ERROR_HANDLING;
while (ReadBit(PROBE_BIT)!=PROBE_ACTIVE_STATE)
{
flag=2;
WaitNextTimeSlice();
}
if (CS0_axis_x>=0) d[0]=chan[CS0_axis_x].Dest;
if (CS0_axis_y>=0) d[1]=chan[CS0_axis_y].Dest;
if (CS0_axis_z>=0) d[2]=chan[CS0_axis_z].Dest;
if (CS0_axis_a>=0) d[3]=chan[CS0_axis_a].Dest;
if (CS0_axis_b>=0) d[4]=chan[CS0_axis_b].Dest;
if (CS0_axis_c>=0) d[5]=chan[CS0_axis_c].Dest;
persist.UserData[MACH3_PROBE_STATUS_VAR]=flag;
StopCoordinatedMotion();
}
}