Hi Tom,
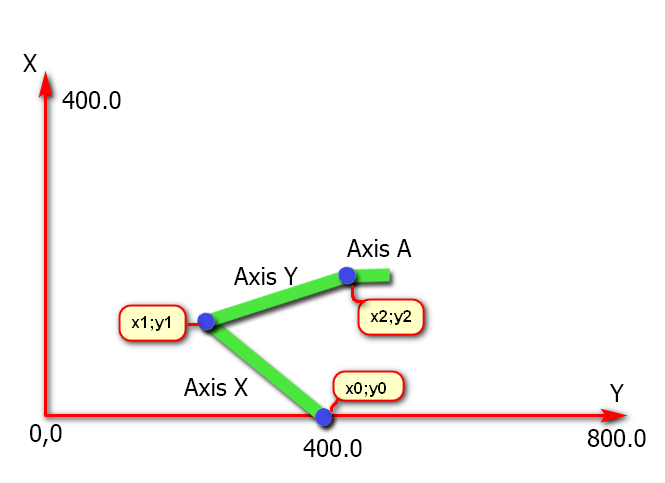
Sorry for not describing the geometry better. It is a yamaha scara robot. I have attached more details but It essentially the same as in your diagram. Both arms are the same length, 23.63 in.
After reading your reply I first moved the arms inline and along something close to an x axis. Then I set the postion of the end (47,0). I tried a simple gcode move, which went in a completely different direction than I expected. It also went way too fast to be safe. So the next thing I did was slow the max velocities and accelerations down in the step response window, and then updated my init file.
Next I tried the jog step. I started with z (channel5) which is just the vertical position of the end effector. It seems spot on.
Then I tried x and y jog steps at .01 inch. The motion is very inconsistent, sometime it really jerks hard other times it is slow and smooth, sometimes it looks like it is generally going in the right direction other times, not so much.
One thing I realized is my shoulder joint is turning the reverse from what I think should be the positive direction, for coordinates as drawn. So for example, a moveRel7=5000 from the console moves in what would be the clockwise direction, looking down on the robot, or towards the x axis. I think I just need to flip the direction in the channel setup? I'm guessing it is straight forward, but I'm missing it. I did try setting the count/deg in the trajectory planner to negative but I don't think that was right. And, oddly, now that I changed x and y ( I mistakenly changed y) I can't seem to set them back? I tried removing the minus, but they seem to persist after choosing "OK" and also after a restart.
On top of all this, I did not do anything with the "jerk" in the step response screen, I left the default. Not sure important this for what is, if I' sayin git right, effectively an open loop system, form Kmotion's perspective?
Thanks for the help,
Dana
PS I'm also attaching my kinematics file and my init file